Selected projects
publications
2022
Meera, A. A., Novicky, F., Parr, T., Friston, K., Lanillos, P., & Sajid, N. (2022). Reclaiming saliency: rhythmic precision-modulated action and perception. Frontiers in Neurorobotics. arXiv preprint arXiv:2203.12652.
Maselli, A., Lanillos, P., & Pezzulo, G. (2022). Active inference unifies intentional and conflict-resolution imperatives of motor control. Plos Computational Biology.
Da Costa, L., Lanillos, P., Sajid, N., Friston, K., & Khan, S. (2022). How active inference could help revolutionise robotics. Entropy, 24(3), 361.
2021
Lanillos, P., Meo, C., Pezzato, C., Meera, A. A., Baioumy, M., Ohata, W., … & Tani, J. (2021). Active Inference in Robotics and Artificial Agents: Survey and Challenges. Under review arXiv preprint arXiv:2112.01871.
Lanillos, P., Franklin, S., Maselli, A., & Franklin, D. W. (2021). Active strategies for multisensory conflict suppression in the virtual hand illusion. Scientific reports, 11(1), 1-14.
Hübotter, J. F., Lanillos, P., & Tomczak, J. M. (2021). Training Deep Spiking Auto-encoders without Bursting or Dying Neurons through Regularization. arXiv preprint arXiv:2109.11045.
Meo, C., Franzese, G., Pezzato, C., Spahn, M., & Lanillos, P. (2021). Adaptation through prediction: multisensory active inference torque control. IEEE Trans. Cog. Dev. Sys.
Meo, C., & Lanillos, P. (2021, March). Multimodal vae active inference controller. In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 2693-2699). IEEE.
Lanillos, P., & van Gerven, M. (2021). Neuroscience-inspired perception-action in robotics: applying active inference for state estimation, control and self-perception. Brain2ai WS @ ICLR
Oliver, G., Lanillos, P., & Cheng, G. (2021). An empirical study of active inference on a humanoid robot. IEEE Transactions on Cognitive and Developmental Systems. [pub][preprint][code][video] https://doi.org/10.1109/TCDS.2021.3049907
Hoffmann, M., Wang, S., Outrata, V., Alzueta, E., & Lanillos, P. (2021). Robot in the mirror: toward an embodied computational model of mirror self-recognition. German Journal of Artificial Intelligence – Künstliche Intelligenz. [pub][preprint][video]
2020
Sancaktar, C., van Gerven, M. A., & Lanillos, P. (2020, October). End-to-end pixel-based deep active inference for body perception and action. In 2020 Joint IEEE 10th International Conference on Development and Learning and Epigenetic Robotics (ICDL-EpiRob) (pp. 1-8). [pub][preprint][code]
van der Himst, O., & Lanillos, P. (2020, September). Deep Active Inference for Partially Observable MDPs. In International Workshop on Active Inference (pp. 61-71). Springer, Cham. [pub][code]
Rood, T., van Gerven, M., & Lanillos, P. (2020, September). A deep active inference model of the rubber-hand illusion. In International Workshop on Active Inference (pp. 84-91). Springer, Cham. [pub][code]
Lanillos, P., Franklin, S., & Franklin, D. W. (2020). The predictive brain in action: Involuntary actions reduce body prediction errors. bioRxiv. link
Lanillos, P., Pages, J., Cheng, G. (2020). Robot self/other distinction: active inference meets neural networks learning in a mirror. European Conference on Artificial Intelligence (ECAI 2020). link
2019
Lanillos, P., Oliva, D, Philippsen, A., Nagai, Y., Cheng, G. (2019). A Review on Neural Network Models of Schizophrenia and Autism Spectrum Disorder. Neural Networks. 122, 338-363. https://doi.org/10.1016/j.neunet.2019.10.014
Rasouli, A., Lanillos, P., Cheng, G., & Tsotsos, J. K. (2019). Attention-based Active Visual Search for Mobile Robots. Autonomous Robots, 44, 131–146. https://doi.org/10.1007/s10514-019-09882-z
Oliver, G., Lanillos, P., & Cheng, G. (2019). Active inference body perception and action for humanoid robots. arXiv preprint arXiv:1906.03022.
Deistler, M., Yener, Y., Bergner, F., Lanillos, P., Cheng, G. (2019). Tactile Hallucinations on Artificial Skin Induced by Homeostasis in a Deep Boltzmann Machine. In IEEE International Conference on Cyborg and Bionic Systems 2019.
Braun, J. F., Díez-Valencia, G., Ehrlich, S. K., Lanillos, P., & Cheng, G. (2019). A prototype of a P300 based brain-robot interface to enable multi-modal interaction for patients with limited mobility. In IEEE International Conference on Cyborg and Bionic Systems 2019.
Tayeb, Z., Jakovleski, P., Chen, Z., Lippert, J., Lanillos, P., Lee, D., Cheng, G.(2019). “Enabling the sense of touch and hand gesture decoding using vibrotactile stimulation and EMG signal for prosthetic hands control”. 9th International IEEE EMBS Neural Engineering Conference.
2018
Lanillos, P., & Cheng, G. (2018). Adaptive robot body learning and estimation through predictive coding. IEEE International Conference on Intelligent Robots and Systems (IROS 2018). Best cognitive robotics paper finalist award.
Hinz, N. A., Lanillos, P., Mueller, H., & Cheng, G. (2018). Drifting perceptual patterns suggest prediction errors fusion rather than hypothesis selection: replicating the rubber-hand illusion on a robot. IEEE international conference on development and learning and on epigenetic robotics (ICDL-Epirob 2018).
Diez-Valencia G., Ohashi T., Lanillos, P., Cheng,G (2018) Sensorimotor learning for artificial body perception. Workshop on Crossmodal Learning for Intelligent Robotics. IEEE Int. Conference on Intelligent Robots and Systems (IROS 2018)
Lanillos, P., Cheng, G. (2018) Active inference with function learning for robot body perception. Workshop on Continual Unsupervised Sensorimotor Learning. IEEE Int. conference on development and learning and on epigenetic robotics (ICDL-Epirob 2018).
Lanillos, P., Cheng, G. (2018) Active Vision, Attention, and Learning in robotics. Workshop on Active Vision, Attention, and Learning. IEEE international conference on development and learning and on epigenetic robotics (ICDL-Epirob 2018).
2017
Kaboli, M., Feng, D., Yao, K., Lanillos, P., Cheng, G. (2017) A tactile-based framework for active object learning and discrimination using multi-modal robotic skin, 2017, IEEE Robotics and Automation Letters (RA-L), vol. PP, no. 99, pp. 1–1, 2017.
Lanillos, P., Emannuel-Dean, L., Cheng, G. (2017) Enactive Self: a study of engineering perspectives to obtain the sensorimotor self through enaction. 7th Joint IEEE International Conference on Development and Learning and on Epigenetic Robotics (ICDL-EpiRob). Accepted.
Lanillos, P., Ferreira, J. F., & Dias, J. (2017). A Bayesian Hierarchy for Robust Gaze Estimation in Human-Robot Interaction. International Journal of Approximate Reasoning.
2016
Lanillos, P., Emannuel-Dean, L., Cheng, G. (2016) Yielding self-perception in robots through sensorimotor contingencies. IEEE Transactions on Cognitive and Developmental Systems.
Lanillos, P., Cheng, G. (2016), Robots with self-perception: objects discovery and scene disambiguation using visual, proprioceptive and tactile cues correlation during interaction. Poster at Robotics in the 21st century: Challenges and Promises International Workshop (funded by the Volkswagen Foundation and the HeKKSaGOn Network). Sept 2016.
Lanillos, P., Emannuel-Dean, L., Cheng, G. (2016), Multisensory Object Discovery via Self-detection and Artificial Attention. IEEE Int. Conf. on Developmental Learning and Epigenetic Robotics (ICDL-EpiRob). Sept 2016. Best paper presentation distinction award
Dianov, I., Ramirez-Amaro, K., Lanillos, P., Dean-Leon, E., Bergner, F., Cheng, G. Extracting general task structures to accelerate the learning of new tasks. IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids 2016).
Emmanuel-Dean, L., Ramirez-Amaro, K., Bergner, F., Dianov, I., Lanillos, P. and Cheng, G. (2016): Robotic technologies for fast deployment of industrial robot systems. IEEE Industrial Electronics Conference (IECON). Oct 2016.
Oliveira, B., Lanillos, P., Ferreira, J.F. (2016): Gaze Tracing in a Bounded Log-spherical Space for Artificial Attention Systems. Robot 2015, Second Iberian Robotics Conference. Advances in Intelligent Systems and Computing, Springer International Publishing, 418, 407-419.
2015
Lanillos, P., Ferreira, J. F., Dias, J. (2015): Designing an Artificial Attention System for Social Robots. In Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on, IEEE.
Ferreira, J. F., Lanillos, P., and Dias, J. (2015): Fast exact Bayesian inference for high-dimensional models. In Workshop on Unconventional computing for Bayesian inference in Intelligent Robots and Systems (IROS), 2015 IEEE/RSJ International Conference on, IEEE.
Lanillos, P., Ferreira, J. F., & Dias, J. (2015): Multisensory 3D saliency for artificial attention systems. In 3rd Workshop on Recognition and Action for Scene Understanding (REACTS), 16th International Conference of Computer Analysis of Images and Patterns (CAIP), 1-6.
Lanillos, P., Ferreira, J. F., Dias, J. (2015): Designing Social Interaction with Robots – Towards a Top-Down Articial Attention Systems. In 1st workshop on improving the quality of life in the elderly using robotic assistive technology: benefits, limitations and challenges, 7th International Conference on Social Robotics (ICSR 2015).
2014
Lanillos, P., Gan, S. K., Besada-Portas, E., Pajares, G., Sukkarieh, S. (2014): Multi-UAV target search using decentralized gradient-based negotiation with expected observation. Information Sciences, 282, 92-110. [IF: 4.038, Q1]
Lanillos, P., Besada-Portas, E., Lopez-Orozco, J. A., de la Cruz, J. M. (2014): Minimum time search in uncertain dynamic domains with complex sensorial platforms. Sensors, 14(8), 14131-14179. [IF: 2.245, Q1].
Lanillos, P., Ferreira, J. F., & Dias, J. (2014): Evaluating the Influence of Automatic Attentional Mechanisms in Human-Robot Interaction. In Workshop: a bridge between Robotics and Neuroscience Workshop in Human-Robot Interaction, 9th ACM/IEEE International Conference on, Bielefeld, Germany.
2013
Lanillos, P. (2013): Minimum time search of moving targets in uncertain environments. Ph.D. Dissertation, Universidad Complutense de Madrid.
Lanillos, P., Yañez-Zuluaga, J., Ruz, J. J., Besada-Portas, E. (2013): A bayesian approach for constrained multi-agent minimum time search in uncertain dynamic domains. In Proceeding of the fifteenth annual conference on Genetic and evolutionary computation conference. ACM. 391-398.
2012
Lanillos, P., Besada-Portas, E., Pajares, G., Ruz, J. J. (2012): Minimum time search for lost targets using cross entropy optimization. In Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on (pp. 602-609), IEEE.
Besada-Portas, E., Lopez-Orozco, J. A., Lanillos, P., de la Cruz, J. M. (2012): Localization of Non-Linearly Modeled Autonomous Mobile Robots Using Out-of-Sequence Measurements. Sensors, 12(3), 2487-2518. [IF: 2.245, Q1].
2009
Lanillos, P., Ruz, J. J., Pajares, G., de la Cruz, J. M. (2009): Environmental surface boundary tracking and description using a UAV with vision. In Emerging Technologies & Factory Automation (ETFA), 2009. IEEE Conference on, 1-4.
2008
Pajares Martinsanz, G., Ruz Ortíz, J. J., Lanillos, P., Guijarro Mata-García, M., Santos Peñas, M. (2008): Trajectory generation and decision making for UAVs. Revista Iberoamericana de Automática e Informática Industrial, 5(1), 83. [IF: 0.291, Q4].
resume
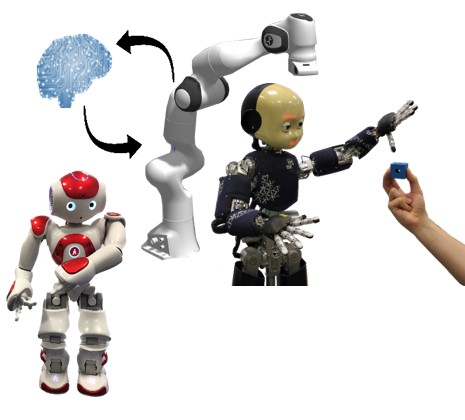
I am currently a PI at the Cajal International Neuroscience Center - Spanish National Research Council in Spain and at the Donders Institute for Brain, Cognition and Behaviour in the Netherlands. I am coordinator of the international projects: Spikeference.eu (HBP), DeepSelf and Metatool EU pathfinder challenge. My current main research interests are Neuroscience-inspired AI, Robot Learning, Active Inference, Machine Learning, Body perception and Human-robot interaction.
Previously I was a Marie Sklodowska Curie Senior Fellow (EU H2020) at the Institute of Cognitive Systems (ICS) of the Technische Universität München, leaded by Prof. Gordon Cheng, working for my funded project: SELFCEPTION
Boston, MA, by Lanie Wurzel
I received the M.Sc. degree in computer sciences and the Ph.D. degree in computer engineering, specialization robotics (July 2013), on the subject "minimum time search of mobile targets in uncertain environments" from Complutense University of Madrid (UCM), Spain. In 2006 I joined the Department of Computer Architecture and Automatic Control, UCM, and as a PhD candidate, I have been a visiting researcher at the Aerospace Control Laboratory (ACL), Massachusetts Institute of Technology; the Artificial Intelligence Laboratory (LIA), Ecole Polytechnique Federale de Lausanne; and the Australian Centre for Field Robotics (ACFR), University of Sydney. From 2012 to 2013 I have also been working as a researcher assistant in the optical department of the Physics faculty (UCM) developing machine learning algorithms for handwritten text recognition. I have been a member of the Spanish Government funded projects: "System for surveillance, search and rescue in the sea by means of the collaboration of autonomous marine and air vehicles" and "Planning, simulation and control platform for multiple aerial and marine vehicles cooperation".
Afterwards, I was a postdoctoral researcher at the Artificial Perception team at the Institute of Systems and Robotics (ISR) of the University of Coimbra under CASIR project: Coordinated Control of Stimulus-Driven and Goal-Directed Multisensory Attention within the Context of Social Interaction with Robots and advised by Prof. João Filipe Ferreira and Prof. Jorge Dias.
WORK
Jan 2023 - Current
Principal Investigator (Ramon y Cajal Fellow)
- Cajal International Neuroscience Center, Spanish National Research Council (CSIC), Spain
- Donders Institute for Brain, Cognition and Behaviour. Radboud University. Nijmegen, the Netherlands.
2021 - Current
Scientific Coordinator of Spikeference, Metatool and DeepSelf projects
Donders Institute for Brain, Cognition and Behaviour. Radboud University. Nijmegen, the Netherlands.
Nov 2019 - Dec 2022
Assistant Professor in Cognitive Artificial Intelligence
Donders Institute for Brain, Cognition and Behaviour. Radboud University. Nijmegen, the Netherlands.
2017 - 2019
Principal investigator. Marie S.Curie H2020.
Project selfception.eu Institute for Cognitive Systems. Technical University of Munich
2015 - 2016
Technical University Foundation Fellow
Institute for Cognitive Systems. Technical University of Munich
2013 - 2015
Postdoc
Institute of Systems and Robotics, University of Coimbra, Portugal
EDUCATION
2013
PhD Artificial Intelligence.
Summa Cum Laude. Mathworks award. Computer Engineering, Complutense University of Madrid, Spain
2008
MSc. Computer Science Research.
Systems Engineering, Control, Automatics and Robotics. Complutense University of Madrid, Spain. Internship at the Massachusetts Institute of Technology
2006
Computer Science
Complutense University of Madrid



Jobs
- Multiple positions in METATOOL EU project
 Can robots invent tools in the same way ancient humans did? The METATOOL project is a groundbreaking international and multidisciplinary project that aims at developing a novel computational model of cognition based on metacognition and predictive processing to enable tool invention and validating its utility in real robots in the context of conditional sequential tasks…
Can robots invent tools in the same way ancient humans did? The METATOOL project is a groundbreaking international and multidisciplinary project that aims at developing a novel computational model of cognition based on metacognition and predictive processing to enable tool invention and validating its utility in real robots in the context of conditional sequential tasks… - Postdoc on brain-inspired deep learning for robots
 Position already filled! The Donders Institute is looking for an early career postdoc on brain-inspired deep learning for robots for the international project DEEPSELF (3 years), funded by the German Research Foundation (DFG), between the Donders Institute (Netherlands, supervision: Pablo Lanillos) and Tübingen University (Germany, supervision: Martin Butz). DEEPSELF is a project that lies between…
Position already filled! The Donders Institute is looking for an early career postdoc on brain-inspired deep learning for robots for the international project DEEPSELF (3 years), funded by the German Research Foundation (DFG), between the Donders Institute (Netherlands, supervision: Pablo Lanillos) and Tübingen University (Germany, supervision: Martin Butz). DEEPSELF is a project that lies between…